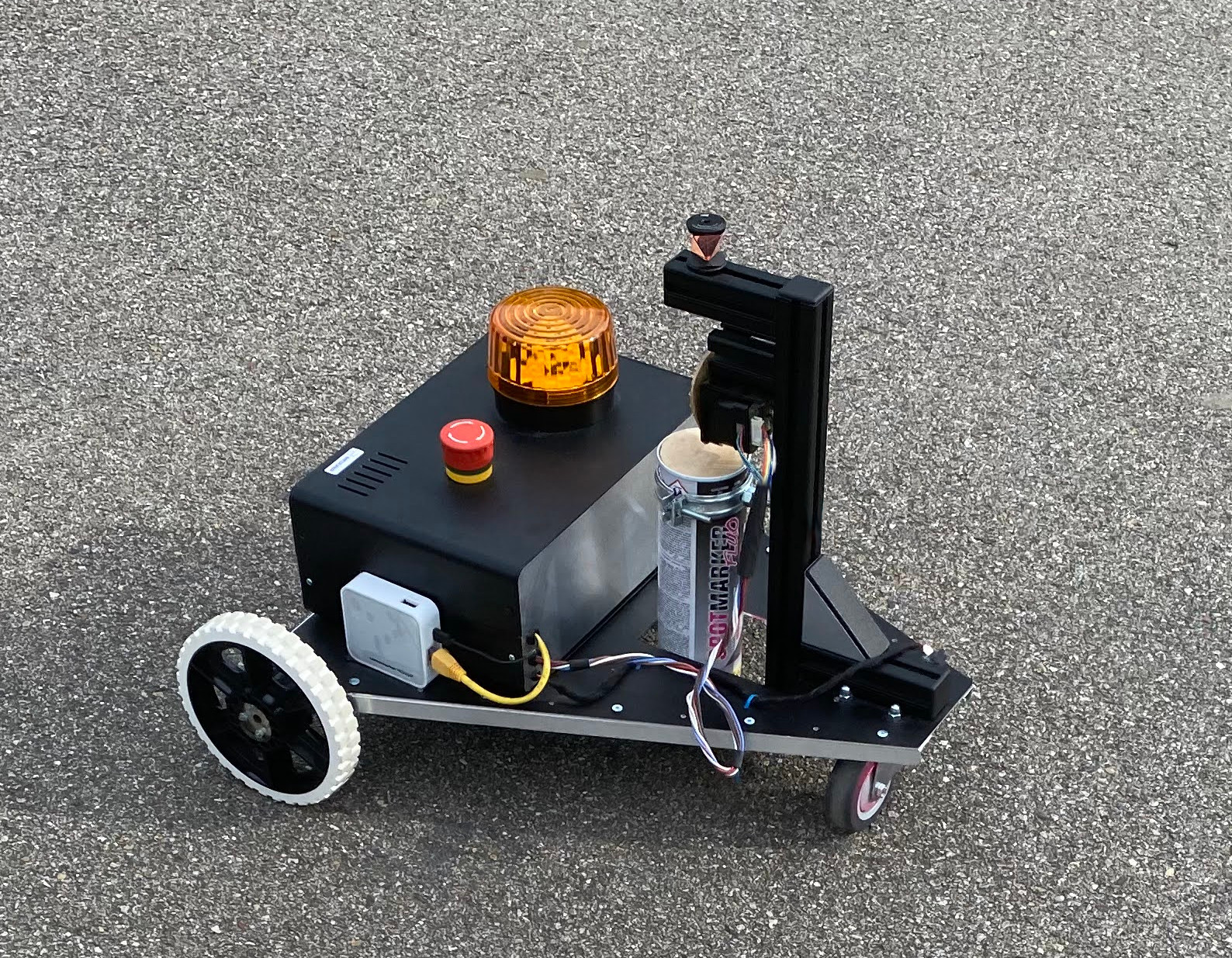
Robot Marker
Roboter zur automatischen Positionierung von Magneten für Koordinatennetze

- Autonombetrieb
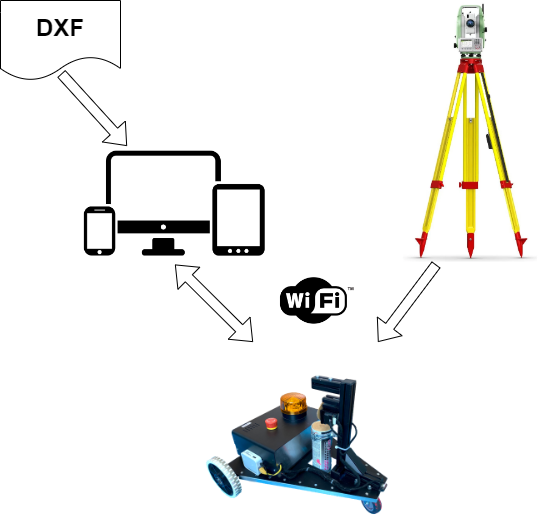
- Web-Basierte Benutzeroberfläche
- Platform Unterstützung – Win, iOS, Android
- Zeitersparnis im Vergleich zum manuellen Einsatz
- Genauigkeit der Markierung 2mm
- geringeres Gewicht
- Einsatzbereit in 2 Minuten
- Easy to us
Arbeitspakete
Die Entwicklung eines Roboters ist ein komplexer Prozess, der eine Vielzahl von Disziplinen und Fachbereichen umfasst. Hier ist eine detaillierte Beschreibung der verschiedenen Schritte, die bei der Entwicklung des Markierungs-Roboters durchgeführt wurden, einschließlich Konzeptdefinition, Umsetzung der Steuerung im Robot Operating System (ROS2), Definition und Umsetzung der Kommunikation mit einer geodätischen Totalstation, Entwicklung der Benutzerschnittstelle und vollständiger Systementwicklung (Software, mechanische Hardware, elektrische Hardware):
1. Konzeptdefinition
Anforderungsanalyse:
- Identifizieren der spezifischen Anforderungen und Ziele des Roboters.
- Definition der Einsatzumgebung und der zu lösenden Aufgaben.
- Festlegung der funktionalen und nicht-funktionalen Anforderungen.
Machbarkeitsstudie:
- Technologische Machbarkeit: Untersuchung verfügbarer Technologien und Komponenten.
- Wirtschaftliche Machbarkeit: Kostenanalyse und Budgetplanung.
- Zeitliche Machbarkeit: Erstellung eines Zeitplans und Meilensteine.
Systemarchitektur:
- Grobentwurf der Systemarchitektur, einschließlich Hardware- und Softwarekomponenten.
- Festlegung der Kommunikationsschnittstellen und Interaktionen zwischen den Komponenten.
2. Umsetzung der Steuerung im Robot Operating System (ROS2)
Einrichtung der Entwicklungsumgebung:
- Installation und Konfiguration der ROS2-Entwicklungsumgebung.
- Auswahl geeigneter ROS2-Distributionen basierend auf den Projektanforderungen.
Modellierung des Roboters:
- Erstellung eines URDF (Unified Robot Description Format) Modells zur Beschreibung der physikalischen Struktur des Roboters.
- Simulation des Roboters in Gazebo.
Entwicklung der Steuerungsalgorithmen:
- Implementierung der Basissteuerung für Antriebe und Sensoren.
- Nutzung von ROS2-Nodes zur modularen Strukturierung der Steuerungssoftware.
- Umsetzung der Pfadplanungalgorithmen.
Test und Validierung:
- Durchführung von Tests in der Simulationsumgebung und in dem realen Betrieb.
- Verifikation der Steuerungsalgorithmen und Anpassungen basierend auf den Testergebnissen.
3. Definition und Umsetzung der Kommunikation mit der geodätischen Totalstation
Schnittstellendefinition:
- Analyse der Kommunikationsprotokolle der geodätischen Totalstation.
- Festlegung des Kommunikationsprotokols
Implementierung der Kommunikationsschnittstelle:
- Entwicklung von ROS2-Nodes zur Kommunikation mit der Totalstation.
- Verarbeitung der empfangenen Daten und Integration in die Steuerungsalgorithmen des Roboters.
Kalibrierung und Synchronisation:
- Kalibrierung der Totalstation und des Roboters, um präzise Positionsdaten zu gewährleisten.
- Synchronisation der Zeitstempel, um die Datenintegrität sicherzustellen.
Test und Validierung:
- Test der Kommunikationsschnittstelle in der realen Umgebung.
- Überprüfung der Genauigkeit und Zuverlässigkeit der Positionsdaten.
4. Entwicklung der Benutzerschnittstelle
Anforderungsanalyse:
- Definition der Benutzeranforderungen und -erwartungen.
- Festlegung der Funktionen und des Designs der Benutzerschnittstelle.
Prototyping:
- Erstellung von Mockups und Wireframes der Benutzerschnittstelle.
- Durchführung von Benutzerstudien und Einholen von Feedback.
Implementierung:
- Entwicklung der Benutzerschnittstelle unter Verwendung JScript und Angular Technologien
- Integration der Benutzerschnittstelle mit der ROS2-Steuerungssoftware.
Test und Validierung:
- Durchführung von Usability-Tests mit Endnutzern.
- Anpassungen basierend auf Benutzerfeedback.
5. Komplette Systementwicklung (Software, mechanische Hardware, elektrische Hardware)
Mechanische Hardwareentwicklung:
- Detailliertes Design und Konstruktion der mechanischen Komponenten des Roboters.
- Fertigung und Montage der mechanischen Teile.
- Durchführung von Belastungstests und Anpassungen.
Elektrische Hardwareentwicklung:
- Entwurf der elektronischen Schaltpläne und Leiterplattenlayouts.
- Herstellung und Bestückung der Leiterplatten.
- Integration der Sensoren, Aktoren und Steuerungseinheiten.
Softwareentwicklung:
- Integration aller Softwaremodule (Steuerungsalgorithmen, Kommunikationsschnittstellen, Benutzerschnittstelle).
- Durchführung umfangreicher Tests und Debugging.
- Optimierung der Software hinsichtlich Leistung und Zuverlässigkeit.
Systemintegration:
- Zusammenbau aller Komponenten (mechanische, elektrische und Software).
- Durchführung von Systemtests zur Überprüfung der Gesamtfunktionalität.
- Kalibrierung und Feineinstellung des gesamten Systems.
Validierung und Verifikation:
- Durchführung umfangreicher Tests in der Zielumgebung.
- Sicherstellung, dass alle Anforderungen erfüllt werden und der Roboter zuverlässig funktioniert.
Dokumentation und Übergabe:
- Erstellung der technischen Dokumentation und Benutzerhandbücher.
- Schulung der Endanwender und Übergabe des Systems an den Kunden.