
Validierung noch bevor die Hardware existiert.
Auf Basis der Unreal Engine entwickelt, erweitert um Experiment-Orchestrierung, KI-Wahrnehmungstraining und webbasierte Szenarioplanung.
Herausforderung
Moderne Drohnensysteme kombinieren Flugsteuerung, KI-Wahrnehmung, Sensorfusion und autonome Missionslogik.
Die Entwicklung stützt sich jedoch nach wie vor stark auf begrenzte Flugtests in der realen Welt, teure Hardware-Iterationen, nicht reproduzierbare Randfälle und manuelle Parameteranpassungen.
Algorithmen entwickeln sich schneller als Hardware.
Die Validierung wird zum Engpass.


Lösung
- Eine strukturierte virtuelle Entwicklungs- und Validierungsplattform, die Teams Folgendes ermöglicht:
- Entwicklung und Validierung der Autonomie, bevor die Hardware existiert
- Training von KI-Wahrnehmungsmodellen unter Verwendung synthetischer Datensätze
- Durchführung Monte-Carlo-Simulationen
- Versionierung und Reproduktion von Experimenten
- Definition von Szenarien über einen webbasierten Missionsplaner
- Dies ist nicht nur eine Simulation.
Es handelt sich um validierungsgesteuerte Drohnensystemtechnik.
Plattformübersicht
Die Plattform verbindet Szenarioplanung, Experimentmanagement, High-Fidelity-Simulation, KI-Training und Bewertung zu einem integrierten Workflow.
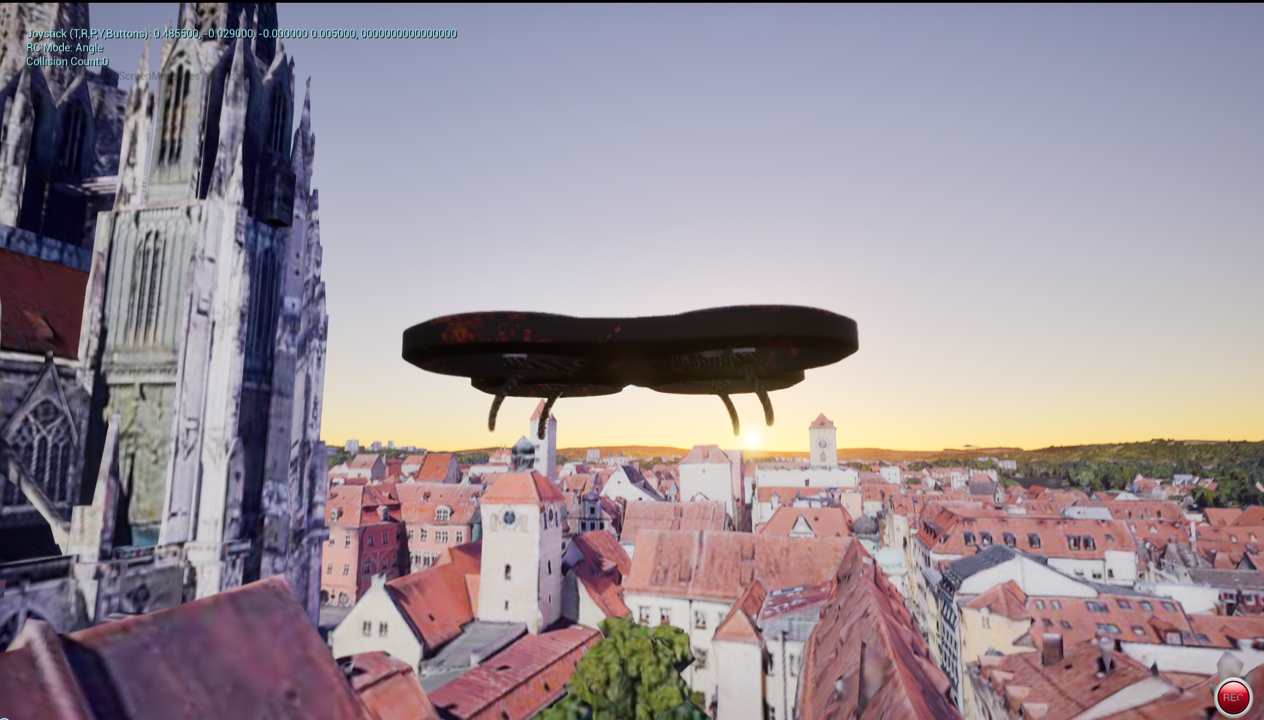
Fotorealistische 3D-Umgebungen, die auf Unreal Engine 5 basieren, werden mit physikalisch präzisen Drohnendynamiken von Microsoft AirSim kombiniert.
Ein Experimentmanager steuert Parameterverteilungen, szenariobewusste Ausführung und reproduzierbare Testläufe.
Entwicklung der Schwarmsteuerungssysteme
Ein KI-Wahrnehmungsstack ermöglicht die automatisierte Generierung von Datensätzen und strukturierte CNN- oder SSD-Trainingspipelines.
Eine Metrik-Engine bewertet die Erkennungsgenauigkeit, Missionserfolgsraten und Fehlermuster in Tausenden von kontrollierten Simulationen.
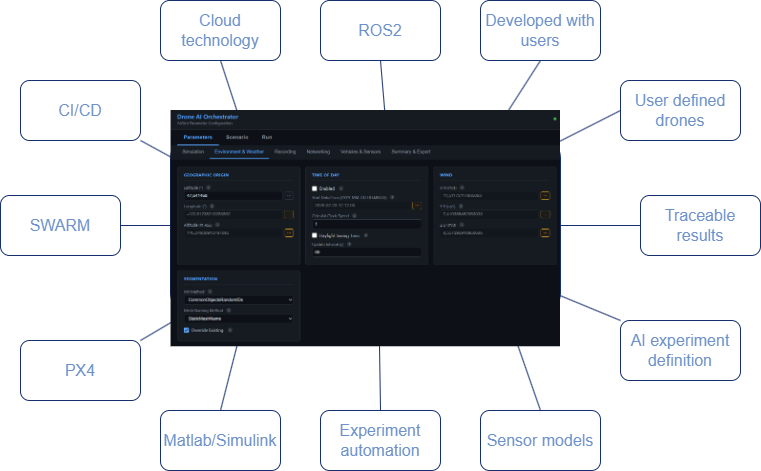
Kernfunktionen
Hochpräzise Simulation
Die Plattform bietet eine hochpräzise Simulation mit fotorealistischen Umgebungen und physikalisch korrekter Dynamik, um reale Flugbedingungen nachzubilden. Sensoren, Umgebung und Fahrzeugverhalten werden konsistent simuliert, um zuverlässige Tests und Validierungen zu ermöglichen. Benutzer können ihre eigenen Drohnenmodelle integrieren und so eine realistische Bewertung von kundenspezifischen Flugwerken, Konfigurationen und Steuerungssystemen innerhalb desselben Simulations-Workflows vornehmen.
Experimentautomatisierung
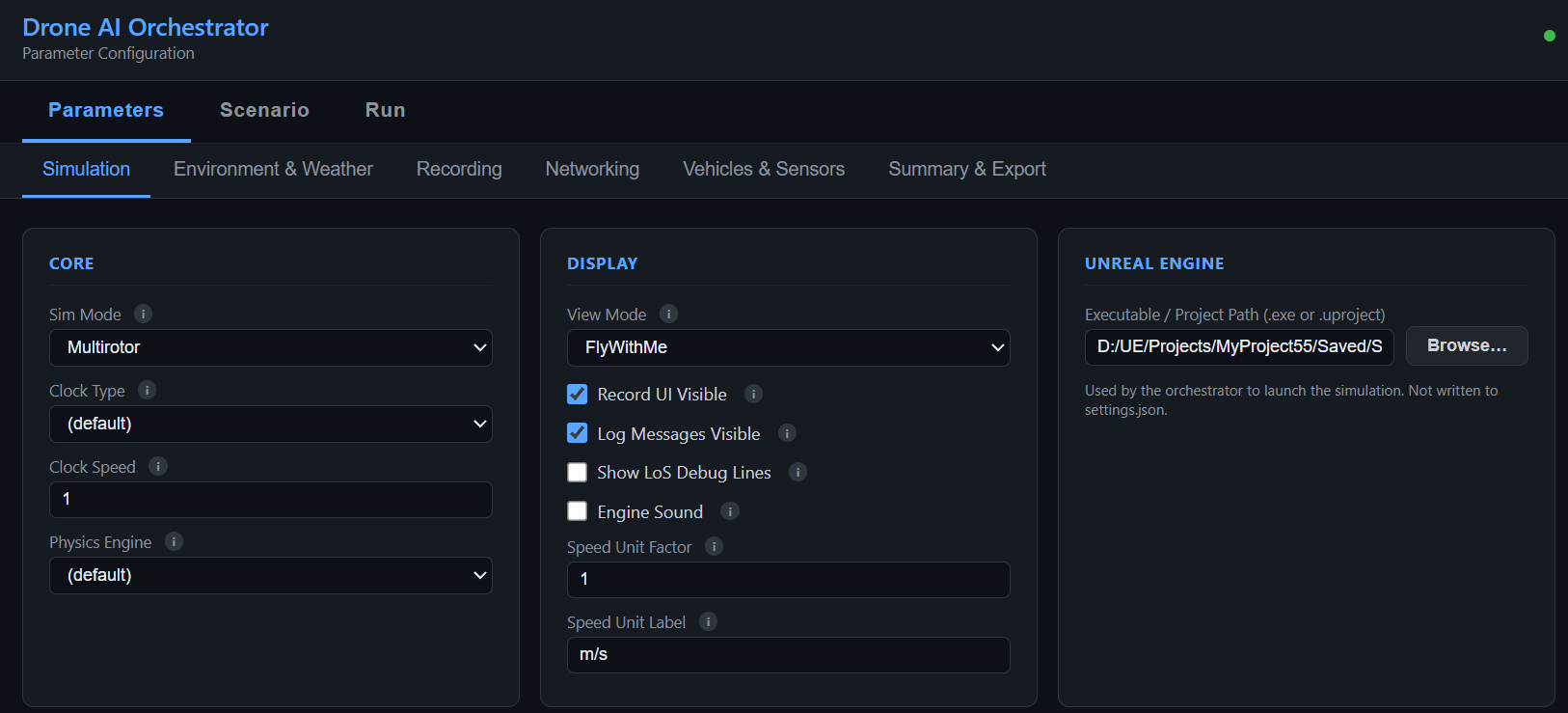 Verteilungsgesteuerte Parametermusterung, Umgebungsrandomisierung, Sensorrauschmodellierung, Edge-Case-Stresstests und vollständige Versionskontrolle für Experimente.
Verteilungsgesteuerte Parametermusterung, Umgebungsrandomisierung, Sensorrauschmodellierung, Edge-Case-Stresstests und vollständige Versionskontrolle für Experimente.
Reproduzieren Sie jeden Test. Prüfen Sie jedes Ergebnis. Skalieren Sie auf Tausende von Durchläufen.
Eigene Physik-Engine
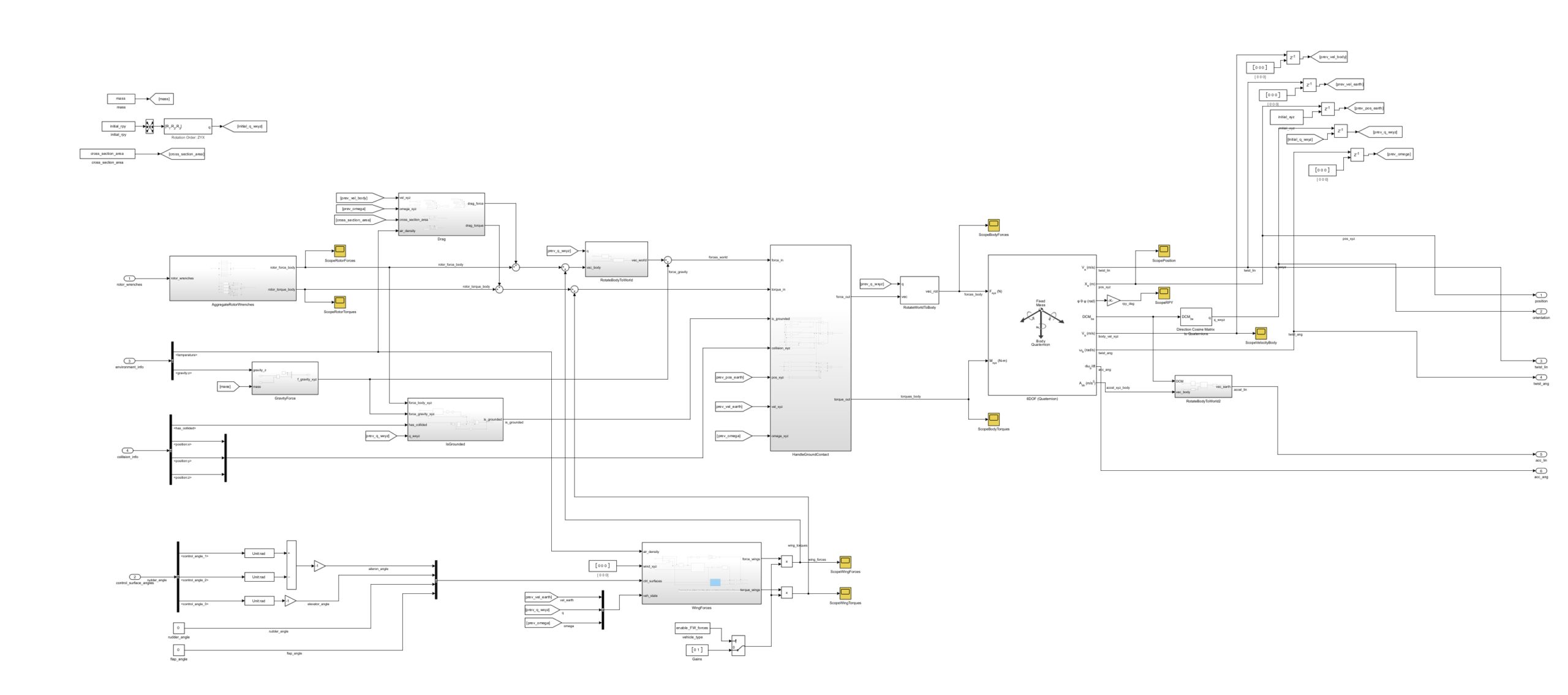 Die Plattform ermöglicht eine vollständige Anpassung der Flugphysik von Drohnen und eine nahtlose Integration in die Simulationsumgebung. Physikalische Modelle können mithilfe von nativem C++-Code, über Embedded Coder oder Simulink Coder generiertem Code oder über benutzerdefinierte Simulink-S-Funktionen implementiert werden. Externe Physik-Engines laufen synchron in Echtzeit mit der Simulation, wodurch ein deterministisches Verhalten und eine konsistente Sensorinteraktion gewährleistet werden, während gleichzeitig die Validierung proprietärer Dynamik- und Steuerungsmodelle möglich ist, ohne den gesamten Arbeitsablauf zu verändern.
Die Plattform ermöglicht eine vollständige Anpassung der Flugphysik von Drohnen und eine nahtlose Integration in die Simulationsumgebung. Physikalische Modelle können mithilfe von nativem C++-Code, über Embedded Coder oder Simulink Coder generiertem Code oder über benutzerdefinierte Simulink-S-Funktionen implementiert werden. Externe Physik-Engines laufen synchron in Echtzeit mit der Simulation, wodurch ein deterministisches Verhalten und eine konsistente Sensorinteraktion gewährleistet werden, während gleichzeitig die Validierung proprietärer Dynamik- und Steuerungsmodelle möglich ist, ohne den gesamten Arbeitsablauf zu verändern.
SWARMs
 Die Plattform ermöglicht die Konfiguration und Simulation von Schwarm-Szenarien mit mehreren Drohnen in einer gemeinsamen virtuellen Umgebung. Jede Drohne kann individuell über ein benutzerdefiniertes Steuerungssystem gesteuert oder im Rahmen vordefinierter Missionen und koordinierter Szenarien betrieben werden. Dies ermöglicht das Testen von kooperativem Verhalten, verteilter Autonomie und Schwarmstrategien unter kontrollierten und reproduzierbaren Bedingungen.
Die Plattform ermöglicht die Konfiguration und Simulation von Schwarm-Szenarien mit mehreren Drohnen in einer gemeinsamen virtuellen Umgebung. Jede Drohne kann individuell über ein benutzerdefiniertes Steuerungssystem gesteuert oder im Rahmen vordefinierter Missionen und koordinierter Szenarien betrieben werden. Dies ermöglicht das Testen von kooperativem Verhalten, verteilter Autonomie und Schwarmstrategien unter kontrollierten und reproduzierbaren Bedingungen.
Flexible und sichere Entwicklung 
Die Simulationsplattform kann entweder in der Cloud für eine skalierbare Ausführung betrieben oder vollständig auf einer dedizierten Infrastruktur bereitgestellt werden. Unternehmen können Simulationen auf ihren eigenen Servern ausführen, um sensible Daten und firmeneigene Modelle innerhalb ihrer internen Umgebung zu behalten. So vermeiden sie die Übertragung von Informationen an Drittanbieter und behalten gleichzeitig die volle Funktionalität und Kontrolle.
KI Perception Training
Generierung synthetischer Daten mit automatischem Export von Annotationen, Domänen-Randomisierung, Datenausgleich und GPU-fähigen Trainingspipelines.
Webbasierte Szenariodefinition
Browserbasierte Missionsplanung mit Pfadbearbeitung, Luftraumbeschränkungen und direktem Export in Simulations-Workflows.
Anwendungsfälle
- Validierung der autonomen Navigation
- Training der KI-Objekterkennung
- Stresstests für Randfälle
- Koordination mehrerer Drohnen
- Strukturierte Workflows für die Entwicklung vor der Zertifizierung
Warum diese Plattform?
Die meisten Teams verwenden Simulationswerkzeuge.
Diese Plattform bietet strukturiertes Validierungs-Engineering.
Sie umfasst die Orchestrierung von Experimenten, das Management der Parameterverteilung, szenariobasierte Automatisierung, versionskontrollierte Validierung, KI-Integration und eine skalierbare Ausführungsarchitektur.
Die Simulation wird zu einem kontrollierten, wiederholbaren Validierungsframework.
Entwickelt für
Drohnen-OEMs, Systemintegratoren in der Luft- und Raumfahrt, Verteidigungsunternehmen, Robotik-Startups, KI-Wahrnehmungsteams und Forschungseinrichtungen, die deterministische, skalierbare und architekturbasierte Validierungsprozesse benötigen.
Validierungsdisziplin für die Drohnenentwicklung
Wechseln Sie von hardwareabhängigen Iterationen
zu einer strukturierten, reproduzierbaren und skalierbaren virtuellen Validierung.
Beginnen Sie mit der Validierung, bevor Sie fliegen
Fordern Sie eine technische Demonstration an oder vereinbaren Sie einen Termin für eine Architekturberatung, um die Integration in Ihren Entwicklungsworkflow zu erkunden.